ev3dev开发环境搭建
硬件准备
-
mini sd card
容量要求在4G到32G. 超过32G的话,ev3识别不了。
-
读卡器
sd卡需要接电脑进行格式化并烧录系统。
-
蓝牙适配器
如果电脑上面不带蓝牙,则需要蓝牙适配器。
软件准备
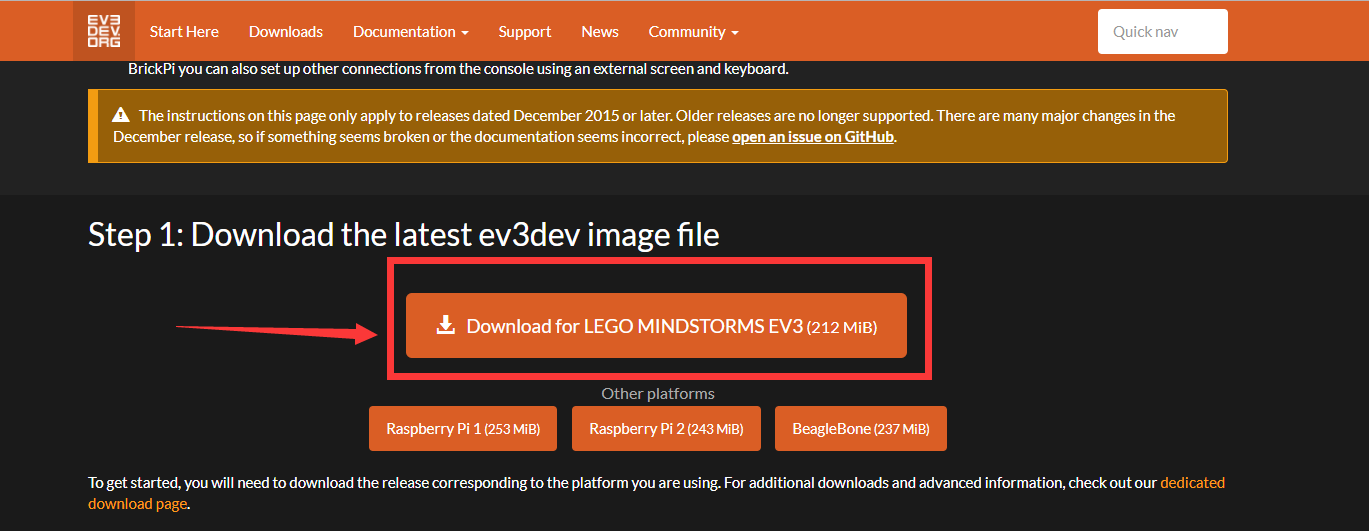
1. 下载最新版的 ev3dev image
到这里下载ev3dev image。
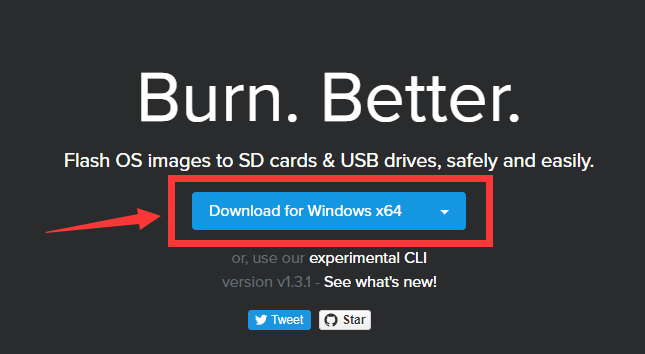
2. 下载etcher
到这里下载etcher。
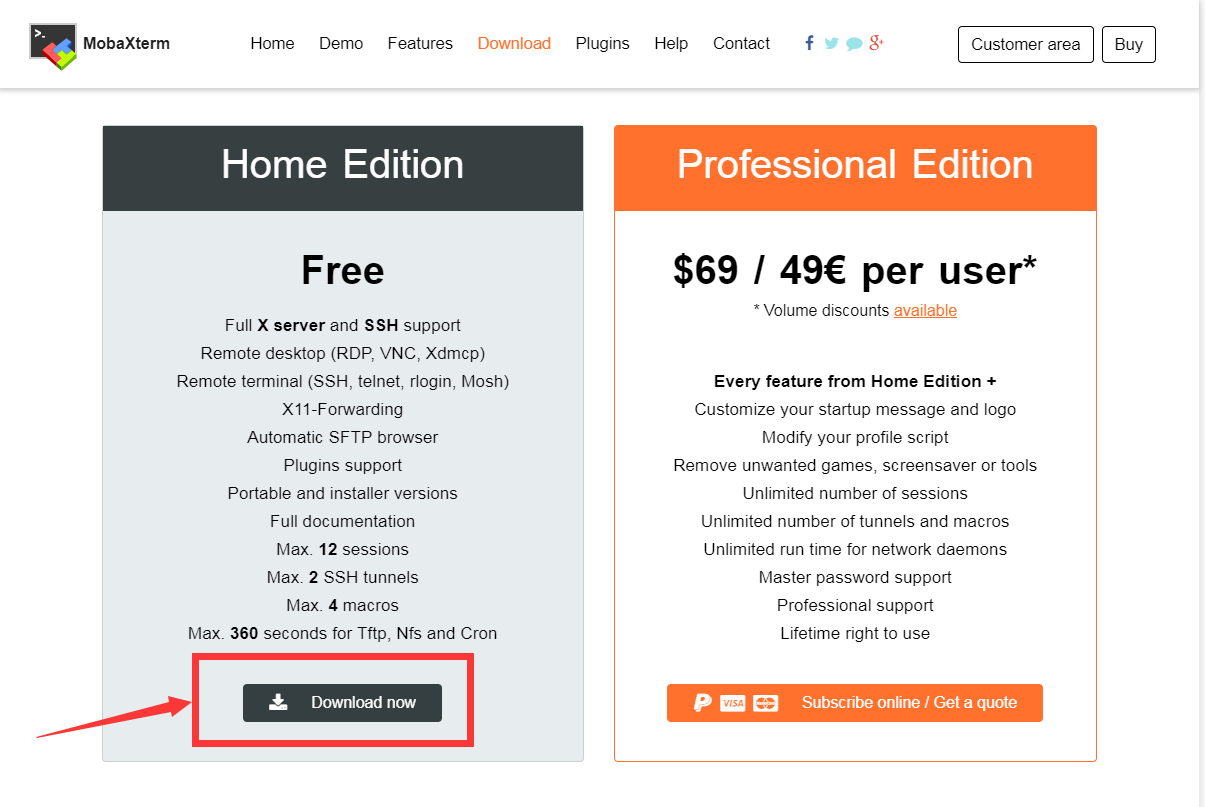
3. 下载MobaXTerm home edition
到这里下载MobaXTerm home edition。
开始配置并通过ssh连接ev3
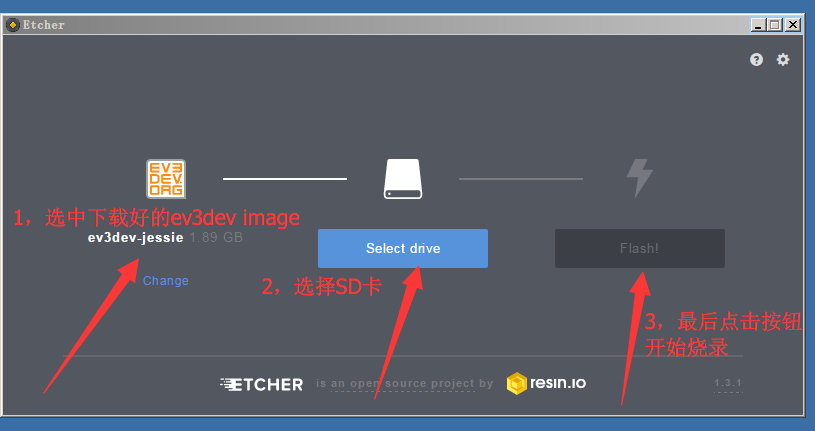
1. 烧录系统到sd卡
通过读卡器把sd卡连接电脑。安装ether后打开ether进行烧录。
2. 创建ev3与电脑之间的蓝牙连接
- 把SD卡插入ev3中,启动ev3
-
开启ev3上面蓝牙
ev3上面这两个选项要选中
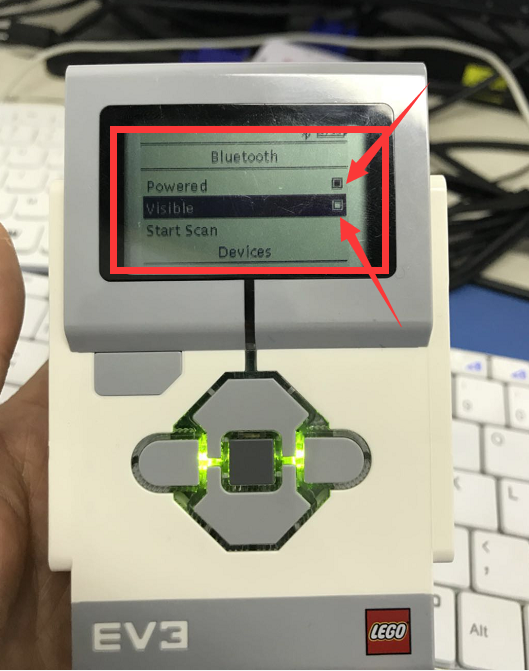
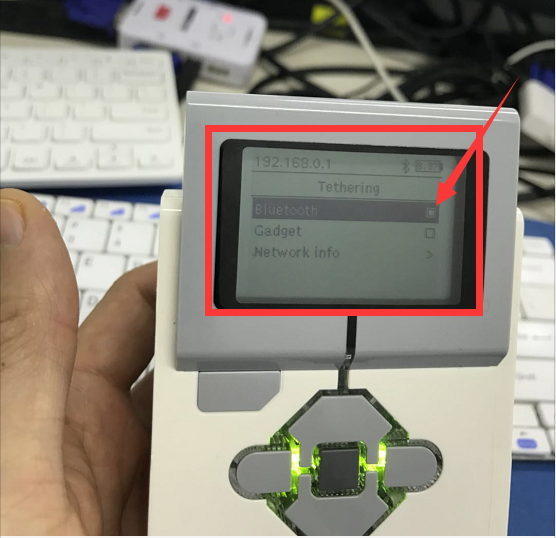
还有这个选项也要选中
-
开始电脑和ev3的蓝牙配对

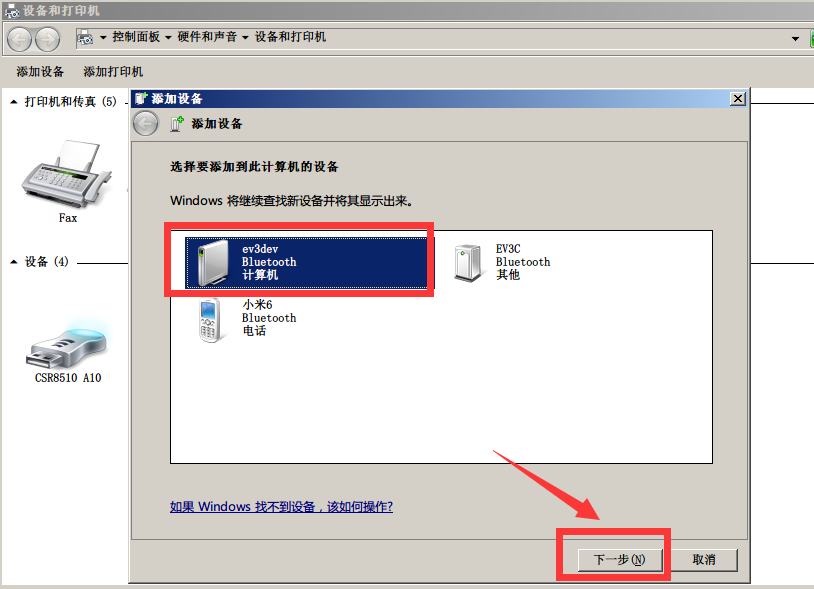

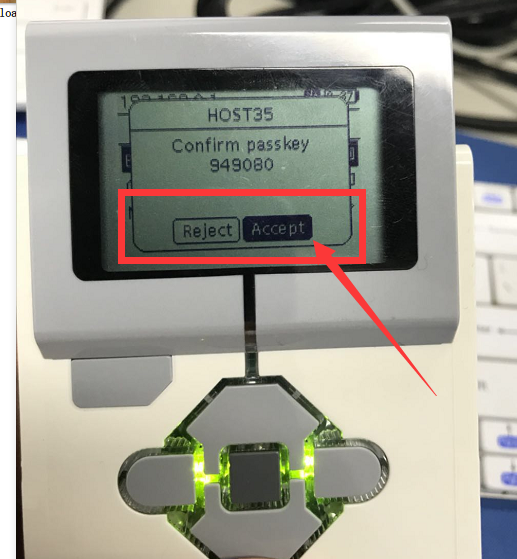
-
通过蓝牙连接ev3和电脑

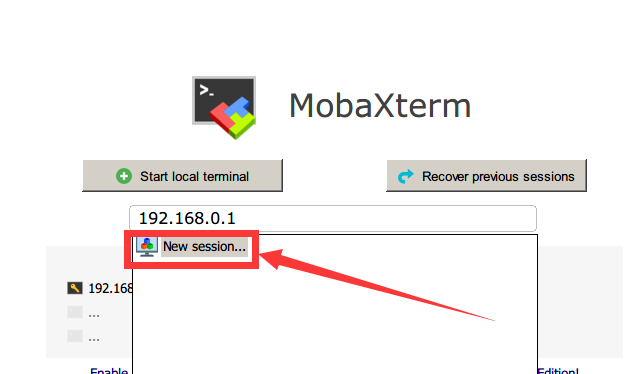
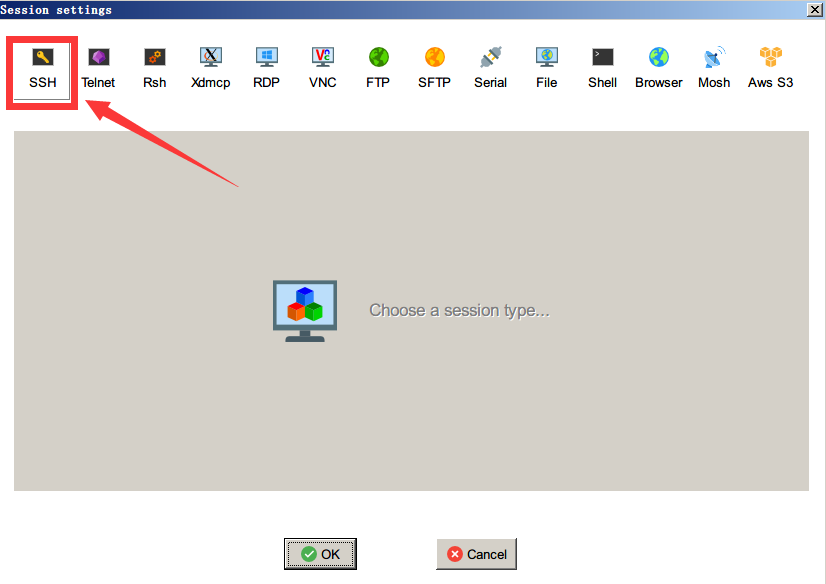
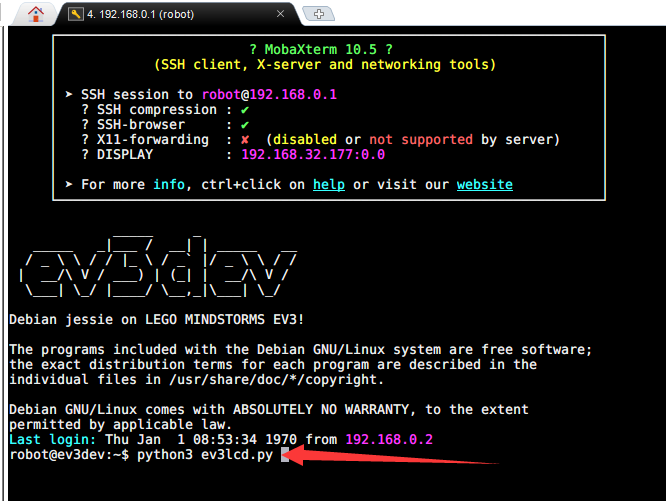
通过ssh连接ev3并运行python程序
- 安装
MobaXterm后打开MobaXterm
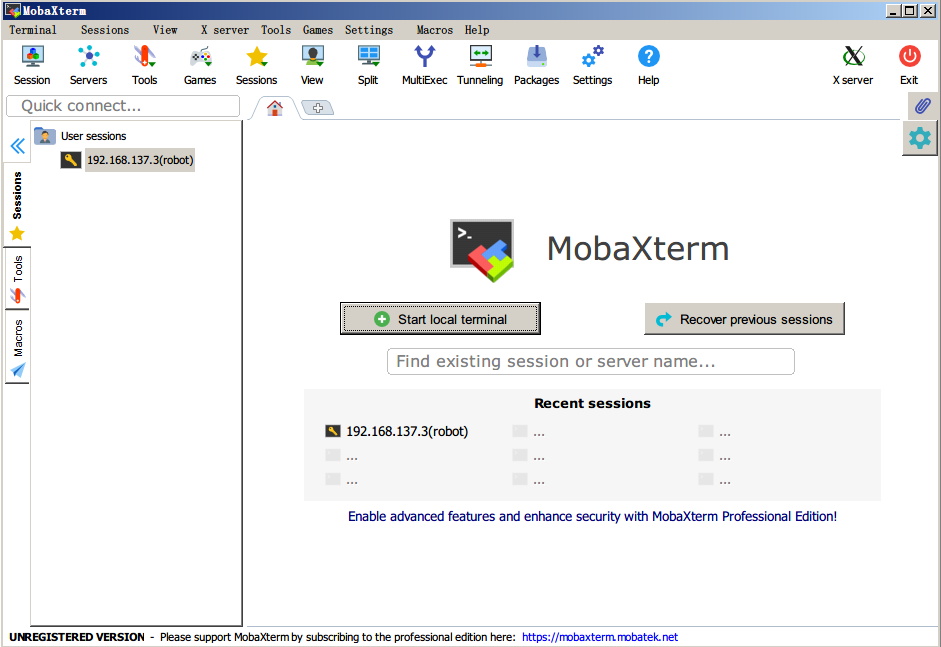
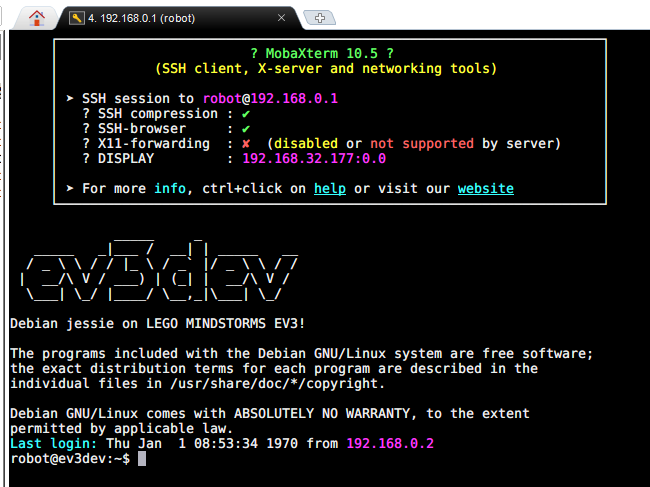
用户名为robot,密码为maker
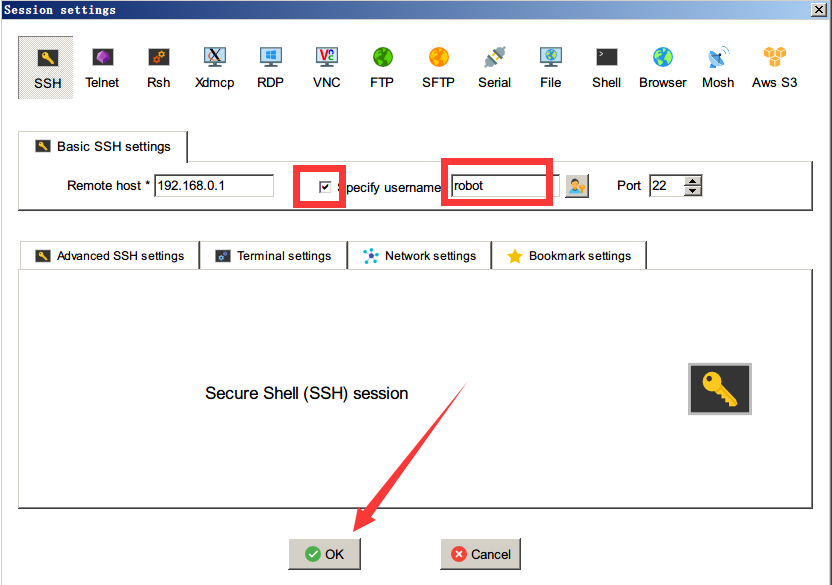
输入密码maker
-
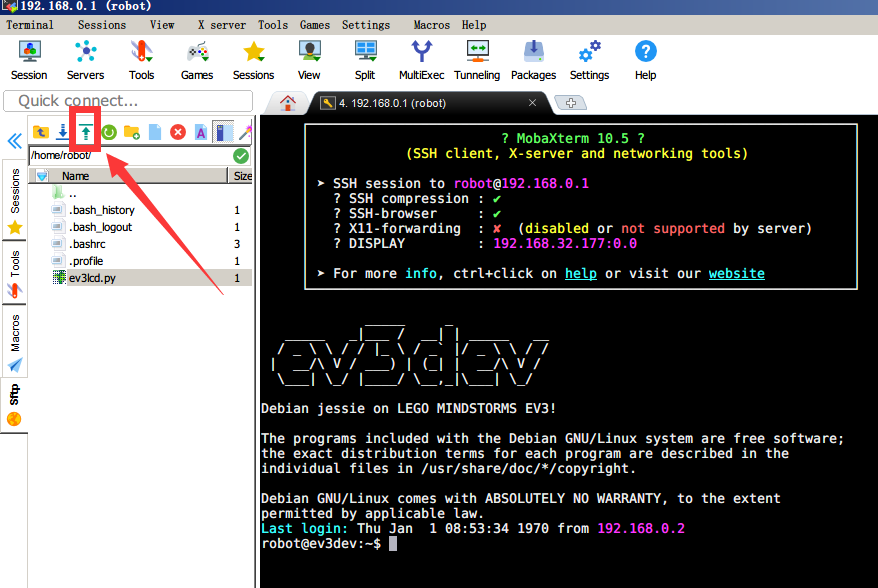
上传python程序到ev3中并运行
将下面内容保存到文件中,并命名为
ev3lcd.py
#!/usr/bin/env python3
from time import sleep
from ev3dev.ev3 import *
lcd = Screen()
smile = True
while True:
lcd.clear()
# lcd.draw returns a PIL.ImageDraw handle
lcd.draw.ellipse((20, 20, 60, 60))
lcd.draw.ellipse((118, 20, 158, 60))
if smile:
lcd.draw.arc((20, 80, 158, 100), 0, 180)
else:
lcd.draw.arc((20, 80, 158, 100), 180, 360)
smile = not smile # toggle between True and False
# Update lcd display
lcd.update() # Applies pending changes to the screen.
# Nothing will be drawn on the lcd screen
# until this function is called.
sleep(1)
上传ev3lcd.py文件到ev3中
运行python程序
运行结果如下
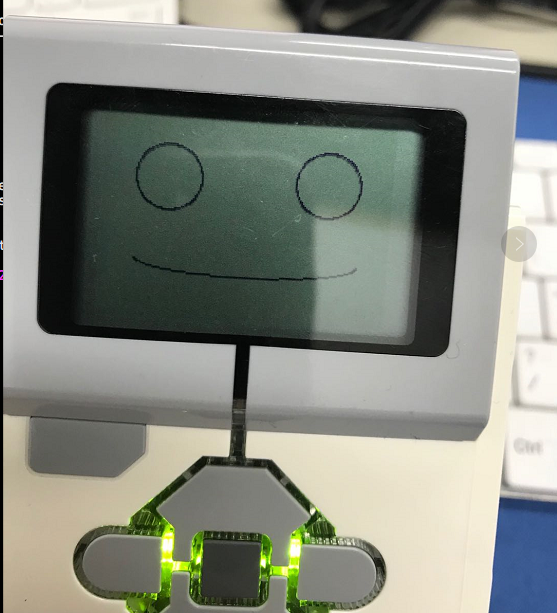
(完)